Diese Woche als Automatisierung der Woche ein Klassiker: Der Staubsaugroboter soll automatisch starten, wenn niemand zu Hause ist.
“Damals” konnte man den Staubsaugroboter einfach nach Zeitplan laufen lassen. Das funktionierte ohne Home-Office bei uns ausreichend und musste nur in der Ferienzeit einmal deaktiviert werden. Jetzt mit regelmäßigem Home-Office klappt dies leider nicht mehr so wie vorher und ich musste eine neue Lösung finden, ihn täglich zu starten und nicht morgens in der Eile vergessen zu aktivieren.
Bei uns läuft er jetzt nach folgendem Schema:
- Keine Bewegung für 30 Minuten registriert
- immer nur Wochentags zwischen 07:00 und 14:00 Uhr
- letzte Ausführung der Automatisierung ist länger als 10 Stunden her
Sobald die Tür während des Saugvorganges geöffnet wird, wird der Vorgang gestoppt und der Roboter fährt zurück zur Basisstation.
Insgesamt benötige ich 2 Automatisierungen. Die Erste ist für den Start zuständig und die Zweite ist zuständig um den Staubsauger beim Öffnen der Tür wieder nach Hause zu schicken.
Verwendete Hardware
An sich ist keine Hardware zwingend notwendig um den Staubsauger zu starten (ausgenommen dem Staubsauger). Aber mit einem Türsensor kann man das ganze doch deutlich komfortabler machen. Dafür habe ich auf den bewährten Sensor von Aqara zurückgegriffen.

Als Staubsauger verwende ich einen Deebot N8. Dieser war für mich ein guter Kompromis aus Preis und Leistung.

Automatisierung 1: Roboter starten, wenn niemand mehr im Haus ist
Die erste Automatisierung beruht auf einem kombinierten Anwesenheitsstatus, der sich aus Bewegung und Prüfen von Netzwerkgeräten im Haus zusammensetzt. Dazu habe ich eine Binärgruppe als Helfer angelegt, um einen kombinierten Anwesenheitsstatus zu erzeugen. Da wir keine Haustiere haben funktioniert das mit den Bewegungsmeldern bei uns hervorragend, das einzige, was gelegentlich einen falschen Wert auslöst, ist der Staubsauger selbst.
Wie du eine Gruppe von Bewegungsmeldern oder anderen Binärsensoren anlegst, habe ich hier beschrieben: mehrere Geräte zu einem Sensor gruppieren.
Jetzt kann ich einfach eine Automatisierung anlegen, die den Staubsauger losschickt, wenn niemand für mind. 30 Minuten im Haus war und es werkstags zwischen 7 und 14 Uhr ist. Das sieht dann so aus:
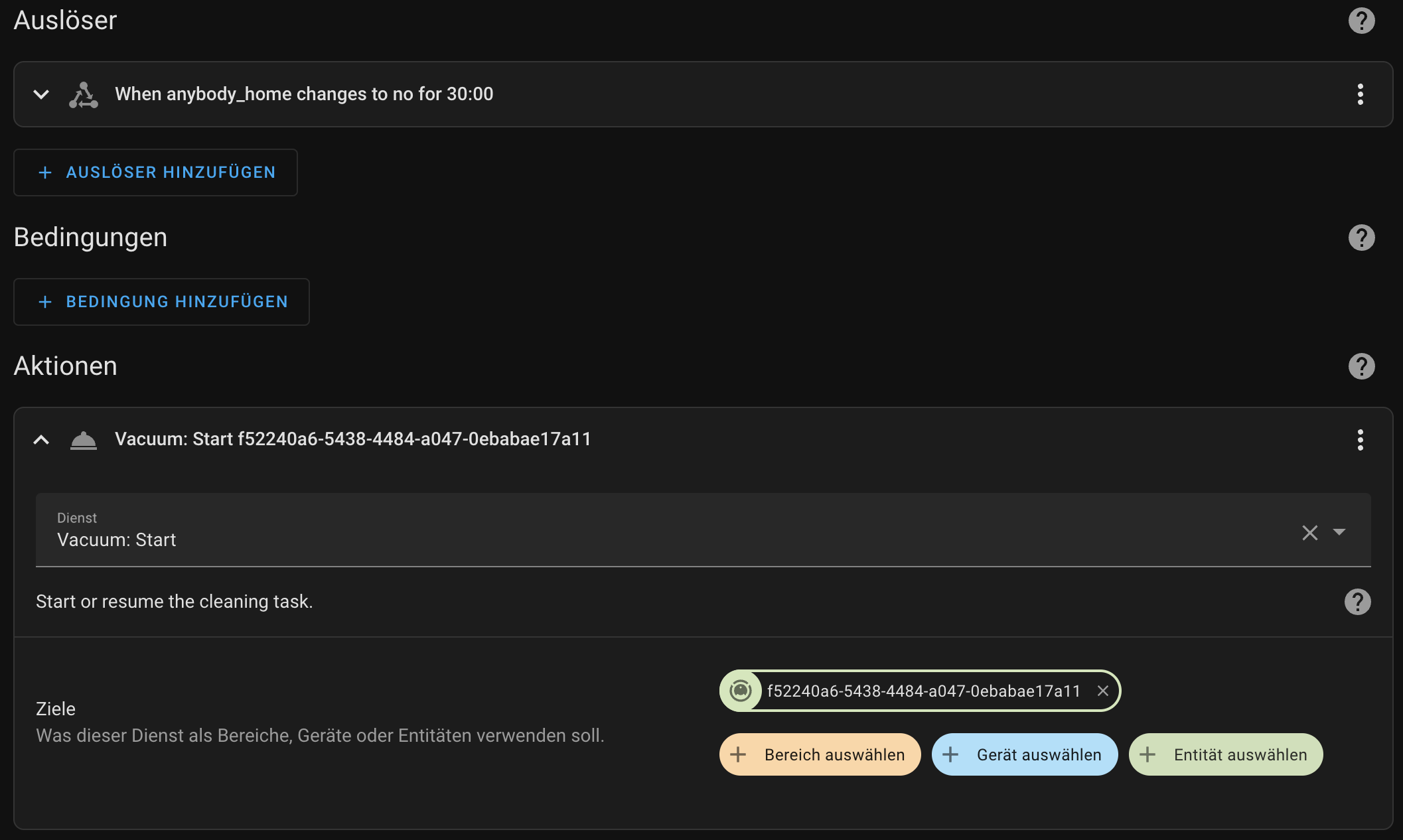
Als YAML sieht das dann wie folgt aus:
description: ""
mode: single
trigger:
- platform: state
entity_id:
- input_select.anybody_home
to: "no"
for:
hours: 0
minutes: 30
seconds: 0
condition: []
action:
- service: vacuum.start
data: {}
target:
entity_id: vacuum.f52240a6_5438_4484_a047_0ebabae17a11
Das Losschicken des Saugroboters mache ich in meinem Fall über die Deebot Hacs Integration. Hier musst du jeweils für dein Modell eine passende Integration wählen.
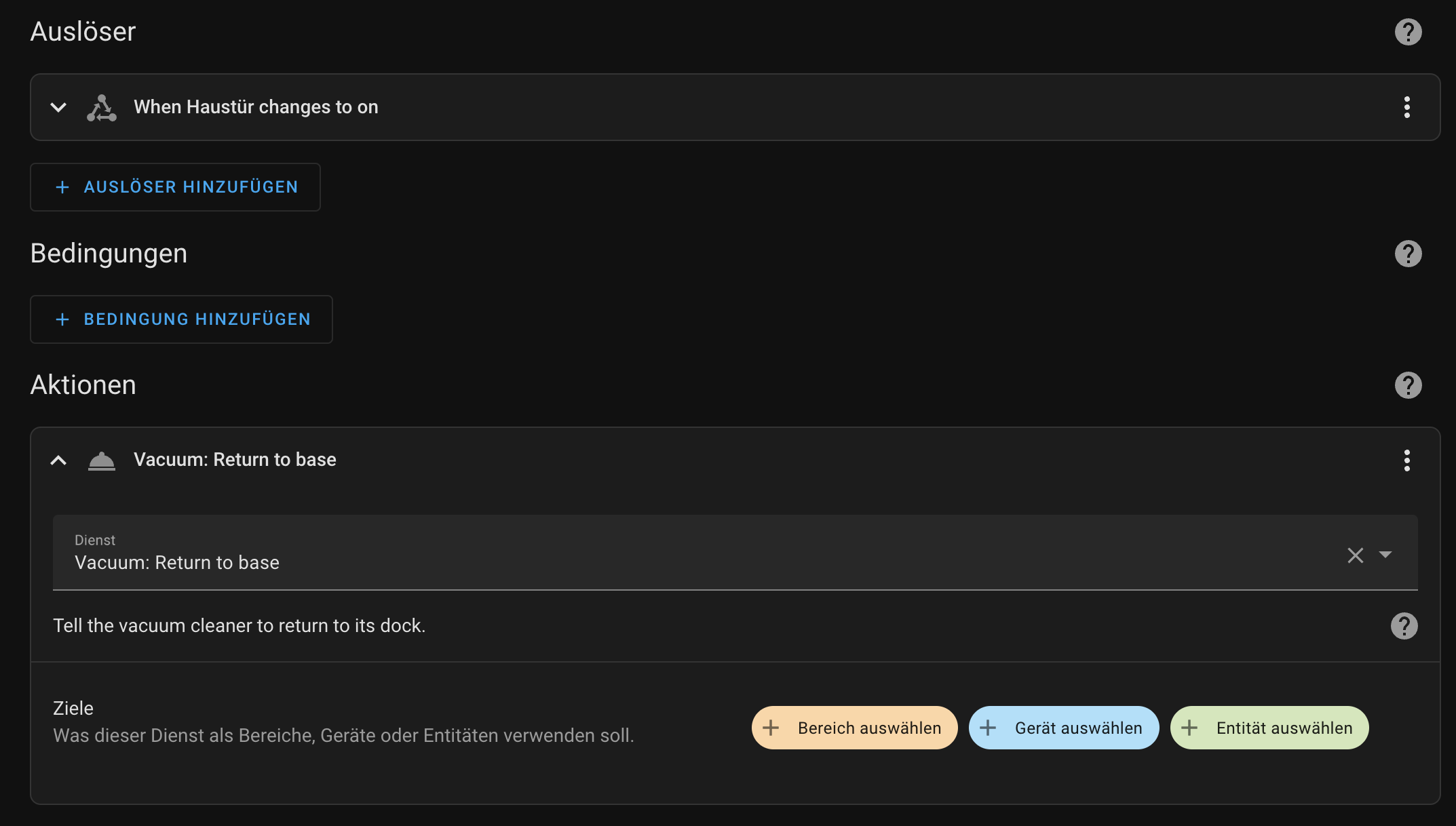
Automatisierung 2: Saugvorgang beenden, sobald die Tür geöffnet wird
Wenn die Tür während des Saugvorganges geöffnet wird, wird der Vorgang gestoppt und der Roboter fährt zurück zur Basisstation. Dies wird über einen Aqara Fensterkontakt an der Haustür und einer einfachen Automatisierung ermöglicht.
Hierbei gibt es aber zwei Fälle, die man beachten sollte:
- Wenn du den Staubsauger manuell gestartet hast, dann würde er beim Verlassen des Hauses einen Stop Befehl bekommen.
- Je nach Integration könnte es zu unerwünschtem Verhalten kommen, wenn du einen Ladestation-Befehl schickst, wenn er bereits in der Ladestation steht.
Um die Probleme auch noch abzufangen, könnte man noch eine Bedingung als Filter einfügen, um den Roboter nur nach Hause zu schicken, wenn die Start-Automatisation in den letzten 2 Stunden ausgeführt wurde.
Als Bedingungstyp hier Template wählen und einen Check-in ähnlicher Form einbauen:
{{ (as_timestamp(now()) - as_timestamp(state_attr('automation.id_der_start_automatisierung', 'last_triggered'))) | int(0) <= 7200 }}

So kann die fertige Automatisierung zum nach Hause schicken aussehen. Bei uns funktioniert das damit gut. Wir bekommen wenig vom Roboter mit und wenn wir eines Tages auf ein Modell mit Absaug- und Wasserstation wechseln, haben wir kaum noch Berührungspunkte mit unserem kleinen Helfer.
Jeden Freitag 12:00 Uhr, pünktlich zur Mittagspause, wird eine neue Automatisierung veröffentlicht. Hast du auch eine Automatisierung die hier gut rein passt? Schick sie gerne als Inspiration für andere. Automatisierung der WOche